温州伟创电气代理商------绿色未来 | 伟创全自动垃圾吊系统,现代城市垃圾清运的数智新选择
2025-02-10
随着全球城市化进程的加速,城市垃圾处理和环境管理面临着前所未有的压力。传统的垃圾清运方式在效率、环保和安全等方面的不足,已难以满足日益增长的城市垃圾处理需求。如何提高垃圾清运效率、减少人力成本、同时保障环境和作业人员的安全,成为当下亟待解决的关键问题。温州伟创电气代理商凭借在自动化领域的技术积累及全产品线优势,打造全自动垃圾吊系统,破解行业难题。方案通过高度自动化的系统设计,兼顾手动、远程控制和自动控制三种操作模式,打破了传统垃圾吊作业的瓶颈,降低了人工操作的安全风险,让城市环境管理和垃圾处理更高效、更智能、更安全。方案成功应用于某市垃圾处理厂,并成为该市的首个全自动垃圾吊项目,赋能智能垃圾清运系统在城市环保领域的全面升级。

伟创全自动垃圾吊系统
打造智慧大脑,让运行更高效
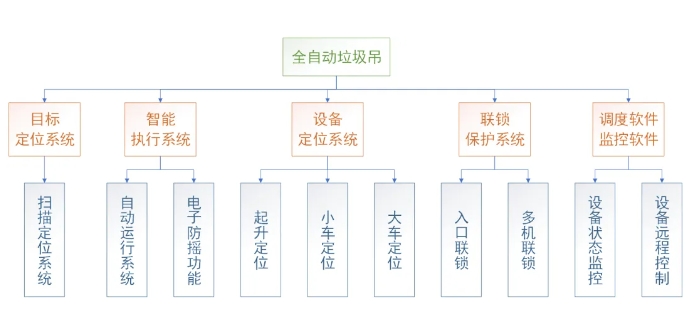
伟创全自动垃圾吊系统,利用激光定位、高精度传感器、防摇控制算法等技术,由定位系统、执行系统、保护系统、监控软件等多个子系统组成,有效解决控制效率和安全性的问题,实现垃圾吊的全自动化高效运行。
系统集成优势
多重技术汇集,助力环保提速
1多种控制模式,灵活应对不同需求
系统设计全面考虑了不同操作环境和需求,支持手动运行、远程控制、自动控制三种控制模式,操作灵活、简便。操作人员可根据现场实际情况选择合适的控制方式,不仅提高了系统适应性,也大大增强了应急情况下的操作效率。
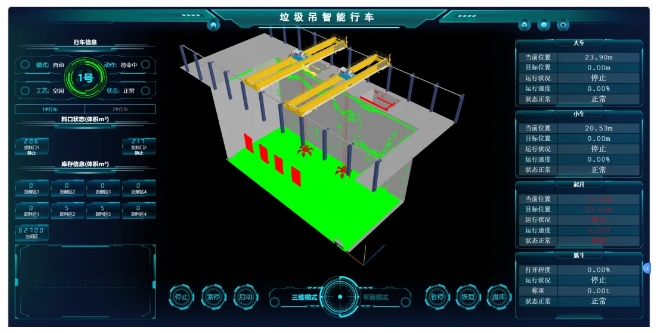
2数智化加持,智能调控高效协同
为了确保垃圾吊在复杂环境下的精确定位和高效作业,系统配置了多个激光扫描平台,实现全工作区域的实时数字建模。通过激光扫描技术,系统能够精准获取目标位置,自动判断并执行相关动作。同时,结合数字孪生技术,系统能够创建虚拟的垃圾吊作业环境模型,并与实际环境实时对接。通过数字孪生的反馈与预测功能,系统可以更高效地模拟和优化作业路径,提前识别潜在问题,从而提高作业效率和精度。无论是狭窄空间还是复杂环境,设备都能够高效、精确地完成任务,显著提升垃圾清运的作业精度与可靠性。
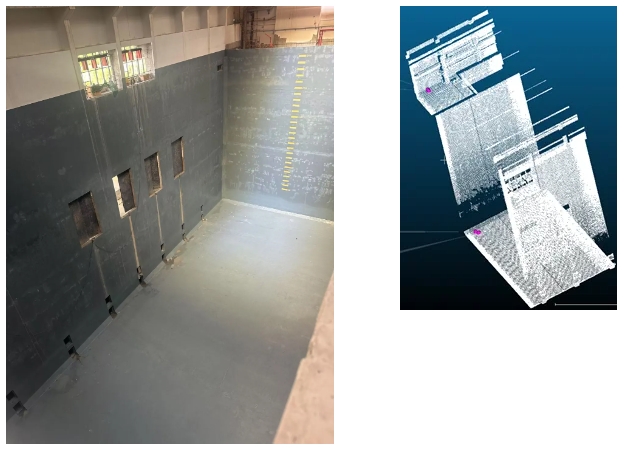
▲ 实景&数字模型
3高精度传感器,实力稳控系统运行
系统采用了先进的高精度激光传感器和光式编码器,能够在恶劣环境下依然确保重要参数的准确可靠。无论是在高温、潮湿或是恶劣的工作条件下,传感器和编码器依旧表现出色,确保系统始终处于最佳工作状态,为设备的稳定性和安全性提供了强有力的保障。
4自动防摇算法,安全保障抓取作业
为应对垃圾吊在不同高度下吊具可能出现的摆动问题,系统内置了伟创自主开发的自动防摇算法。算法能够有效抑制抓斗摆动,确保设备在任何高度下运行时都能保持在安全范围内。通过自动防摇技术,极大地提高了设备的稳定性,减少了因摆动带来的安全隐患,为操作人员提供了更高的安全保障。
5多重安全防护,确保设备运行安全
系统特别针对多机联动及交叉作业情况配置了多重安全保护机制。在软件调度层、自动执行层、单机控制层等多个环节设计了冗余措施,确保设备在复杂工况下仍能稳定运行。此外,通过软硬件安全保护的多重设计,能够在系统出现故障时自动切换到备用方案,进一步保障了设备的安全性和可靠性。
全自动垃圾吊项目的成功实施,标志着伟创在智能垃圾清运领域已处于先进地位。未来,伟创电气将继续聚焦工业领域的自动化、智能化、数字化,通过持续的创新和优化,为行业的数智化转型贡献更多自主力量。